For controlling 12 V LED auxiliary lighting strips. At first I thought that finding such a device would be easy these days, but it turned out to be more difficult. Everything I came across in stores either did not meet my requirements or was very expensive. So I decided to build my own, specifically for my needs.
My LED strips consume 20 watts per meter and there is a maximum of 5 meters of LED strip per dimmer, so I need about 100 watts of power. The maximum current was about 8.3 amperes.
Naturally, the total power dissipation in the dimmer should be below, say, 1 watt. Therefore, if we use one FET, we need a Rds value of 14.5 mOhm. And if necessary, we can always solder two or more in parallel, and, if necessary, reduce the channel resistance.
Controlling the brightness with a simple variable resistor is the simplest way to control a dimmer, but such devices are difficult to find on sale. Most dimmers available in stores are equipped with IR remote controls. In my opinion, this is an unnecessary complication.
A total of 3 sets are needed, so cost was also an important factor. All the decent dimmers I could find were priced at $50 and up. And here you can fit everything into this price.
Most of the remote controlled dimmers only have 8 brightness levels. And everything I found works linearly, which makes the diagrams meaningless. People perceive brightness logarithmically, not linearly. So going from 1% to 2% looks the same as going from 50% to 100%.
Linear control will not give you precise adjustment at the lower limit. Ideally, one would have an exponential transfer function from the PWM duty cycle controller to compensate for the logarithmic nature of human vision. And the easiest way to do this is with a microcontroller.
This design is based on an 8-bit PIC16F1936 microcontroller. There's nothing special about this particular model, I've just used them a few times before and still had some reserve.



And the LM2931 provides a stable 5 volts from a 12 volt input voltage. I use the LM2931 as a standard 5V regulator. It is compatible with the legendary 7805 regulator, but survives input voltages ranging from -50 to +60 volts, making it very robust against possible transients.



The MK is driven by an LM5111 dual FET driver that provides a powerful 12V output via a pair of IPB136N08N3 N-channel transistors. It is inexpensive, SMD type and excellent Rds - 11.5 mOhm.
Overall: if you need an LED dimmer for strips, have a soldering iron and some free time, it makes sense to build your own device. It's not too difficult. And the diagram is accompanied by a file with all the necessary eagle files, layouts, diagram, and software.
PWM brightness controller on MK ATmega8, battery-powered, and charge indication.
The article is intended for persons with some knowledge of radio electronics, namely:
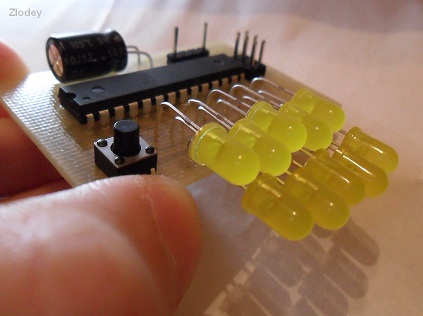
The project was designed to be installed on a bicycle. How it all began. My friends and I often took part in night bike rides, so we needed a headlight for our bike. Well, I didn’t want to install a regular flashlight... I needed something more functional. For example, with brightness adjustment “low / medium / maximum”, and since it was planned to use a lithium-ion battery as power supply, a charge level indicator was also needed. I saw many similar projects on the Internet, but somehow they did not suit me. For example, I came across projects for PWM brightness controllers, but they either did not have a charge level indicator, or the charge level indicator was on 1...3 LEDs, and I did not like such little information content. Well, do it like that, and I set about assembling my project. So, as a charge indicator, I take 10 LEDs, or rather, I take an LED “column”, like this:
I ordered this LED “bollard” from an online store (there are no radio stores in our city), so it will arrive only in a couple of weeks. Instead, I temporarily installed 10 regular LEDs.
I used ATmega8 (or ATmega328) as the control microcontroller, since this MK has an ADC, with which I organized the measurement of the battery charge level. This MK also has a sufficient number of pins (and we want to connect as many as 10 LEDs). This microcontroller is common in radio stores, and is relatively cheap - in the range of 50...100 rubles, depending on the greed of the store and the type of case.
To understand how the device works, let's look at the block diagram:

This article describes only what concerns the PWM controller (the left side of the block diagram), and you choose the LED driver and the LED itself to your taste, the one that suits you best. The ZXSC400 driver suits me, so I will use it as an example.
The PWM controller must be connected to an LED driver that has a dimming function (DIM, PWM, etc.), such as the ZXSC400. You can use any other suitable driver, as long as it supports PWM brightness control and is powered by the same battery that powers the PWM controller. For those who do not know what an LED driver is, I’ll explain: a driver is needed so that the LED glows equally brightly both when the battery is charged and when the battery is dead. In other words, the LED driver maintains a stable current through the LED.

Typical circuit diagram for switching on the ZXSC400 LED driver:

The power of this circuit must be connected to the power of our PWM regulator, and the PWM output from the regulator must be connected to the “STDN” input of the ZXSC400 driver. The “STDN” pin is used to adjust the brightness using a PWM signal. In a similar way, you can connect a PWM controller to many other LED drivers, but this is a separate topic.
Algorithm of device operation. When power is applied, the MK displays the battery charge level for 1 second (on an LED scale of 10 LEDs), then the LED scale goes off, the MK goes into energy saving mode and waits for control commands. I made all the controls on one button in order to pull fewer wires on the bike. When you hold the button for more than 1 second, the PWM controller turns on, and a signal with a duty cycle of 30% (1/3 of the LED brightness) is supplied to the PWM output. When you press the button again for more than 1 second, the PWM controller turns off, and no signal is sent to the PWM output (0% duty cycle). When you briefly press the button, the brightness switches from 30% - 60% - 100%, and the battery charge is displayed for 1 second. Thus, a single press changes the brightness of the LED, and a long press turns the LED on/off. To test the functionality of the PWM controller, I connected a regular LED to its output, but I repeat once again - solely for the purpose of testing functionality. In the future I will connect the PWM controller to the ZXSC400 driver. The operation of the device is shown in more detail and clearly in the video (link at the end of the article).
The following diagram also shows the process of adjusting brightness:

What to do if you are not satisfied with these brightness values? For example, you want it to be like this: 1%, then 5%, then 100%. I have provided for this option as well. Now the user can set these three brightness values to whatever he wants! To do this, I wrote a small program that, based on the desired values, generates a file for flashing the EEPROM. By flashing this file into the microcontroller, the brightness will change accordingly to the desired ones. I am attaching a screenshot of the program window:

If you do not flash the EEPROM file, the brightness values will remain “default” - 30%, 60%, 100%. A correctly assembled device does not require configuration. If desired, you can only adjust the minimum, average, and maximum brightness at your discretion. The program and instructions for use are at the end of the article.
Selecting the battery to use. I used a Li-ion battery due to its prevalence and low cost. But in the circuit I included jumper J1, with which you can select what we use as power.

If jumper J1 is in position “1”, then one Li-ion battery is used. If jumper J1 is in position “2”, then three ordinary AAA/AA/C/D batteries are used, connected in series. Jumper J1 is necessary to correctly display the battery charge level, since for a Li-ion battery the operating voltage is approximately in the range of 3.3...4.2V, and for conventional batteries the operating voltage is approximately 3.0...4.5V. I have attached tables of battery voltages with indicator readings at the bottom of the article.
Indicator LEDs. The LEDs that display the battery charge level can be anything. You can adjust their brightness within small limits by changing the value of the current-limiting resistor R1. To display the charge level, a dynamic indication is used, thanks to which energy savings are achieved, since only one LED is lit at a time. You can also watch the video about indicating the battery charge level (link at the end of the article).

The microcontroller can be either ATmega8 or ATmega328. Both of these microcontrollers are compatible in the arrangement of contacts, and differ only in the content of the “firmware”. I used ATmega328 because I had this MK in stock. In order to reduce power consumption, the microcontroller is powered by an internal 1 MHz RC oscillator. The microcontroller program is written in environment 4.3.6.61 (or 4.3.9.65).
The circuit uses a TL431 reference voltage source microcircuit. With its help, good accuracy in measuring battery voltage is achieved. Power is supplied to TL431 from the PC1 pin of the microcontroller through resistor R3. The supply voltage to the TL431 occurs only during the charge level indication. After the indication LEDs go out, the supply voltage is stopped, saving battery energy. The TL431 chip can be found in unusable power supplies from computers, in broken chargers from cell phones, in switching power supplies from laptops and various electronic equipment. I used the TL431 in a SOIC-8 package (smd version), but the TL431 is more common in a TO-92 package, so I made several PCB variations.

About emulation in the program " ". The project in Proteus is not working correctly. Due to the fact that the ATmega8 model does not wake up from sleep mode, and also with brakes, a dynamic indication is displayed. If, after starting the project, you immediately hold the button so that the PWM controller turns on, then everything works. But as soon as you hold down the button again to turn off the PWM controller, the MK will go into sleep and will not wake up again (until the project is restarted). I am not attaching the project in Proteus. Who wants to play around - write, I will send the project to Proteus.
Main technical characteristics:
Below you can download firmware for MK ATmega8 and ATmega328
Shutov Maxim, Velsk
| Designation | Type | Denomination | Quantity | Note | Shop | My notepad | |
|---|---|---|---|---|---|---|---|
| U1 | MK AVR 8-bit | ATmega8-16PU | 1 | To notepad | |||
| U2 | Reference IC | TL431ILP | 1 | To notepad | |||
| Resistors | |||||||
| R1, R2 | Constant resistor SMD 1206 | 330 ohm | 2 | To notepad | |||
| R3 | Constant resistor SMD 1206 | 1 kOhm | 1 | To notepad | |||
| R4 | Constant resistor SMD 1206 | 10 kOhm | 1 | To notepad | |||
| R5 | Constant resistor SMD 1206 | 47 kOhm | 1 | To notepad | |||
| Constant resistor SMD 1206 | |||||||
Every radio amateur is familiar with the NE555 microcircuit (analogous to KR1006). Its versatility allows you to design a wide variety of homemade products: from a simple single-vibrator pulse with two elements in the harness to a multi-component modulator. This article will discuss the circuit for switching on a timer in the mode of a rectangular pulse generator with pulse-width adjustment.
With the development of high-power LEDs, NE555 again entered the arena as a dimmer, recalling its undeniable advantages. Devices based on it do not require deep knowledge of electronics, are assembled quickly and operate reliably.
It is known that the brightness of an LED can be controlled in two ways: analog and pulse. The first method involves changing the amplitude value of the direct current through the LED. This method has one significant drawback - low efficiency. The second method involves changing the pulse width (duty factor) of the current with a frequency from 200 Hz to several kilohertz. At such frequencies, the flickering of LEDs is invisible to the human eye. The circuit of a PWM regulator with a powerful output transistor is shown in the figure. It is capable of operating from 4.5 to 18 V, which indicates the ability to control the brightness of both one powerful LED and an entire LED strip. The brightness adjustment range ranges from 5 to 95%. The device is a modified version of a rectangular pulse generator. The frequency of these pulses depends on the capacitance C1 and resistances R1, R2 and is determined by the formula: f=1/(ln2*(R1+2*R2)*C1), Hz
The operating principle of the electronic brightness control is as follows. At the moment the supply voltage is applied, the capacitor begins to charge through the circuit: +Usupply – R2 – VD1 –R1 –C1 – -Usupply. As soon as the voltage on it reaches the level of 2/3U, the internal timer transistor will open and the discharge process will begin. The discharge begins from the top plate C1 and further along the circuit: R1 – VD2 –7 IC pin – -U supply. Having reached the 1/3U mark, the timer power transistor will close and C1 will again begin to gain capacity. Subsequently, the process is repeated cyclically, forming rectangular pulses at pin 3.
Changing the resistance of the trimming resistor leads to a decrease (increase) in the pulse time at the timer output (pin 3), and as a result, the average value of the output signal decreases (increases). The generated sequence of pulses is supplied through the current-limiting resistor R3 to the gate VT1, which is connected according to a circuit with a common source. The load in the form of an LED strip or sequentially connected high-power LEDs is connected to the open drain circuit VT1.
In this case, a powerful MOSFET transistor with a maximum drain current of 13A is installed. This allows you to control the glow of an LED strip several meters long. But the transistor may require a heat sink.
Blocking capacitor C2 eliminates the influence of interference that may occur along the power circuit when the timer is switched. The value of its capacitance can be any within the range of 0.01-0.1 µF.
 The single-sided printed circuit board has dimensions of 22x24 mm. As you can see from the picture, there is nothing superfluous on it that could raise questions.
The single-sided printed circuit board has dimensions of 22x24 mm. As you can see from the picture, there is nothing superfluous on it that could raise questions.
After assembly, the PWM dimmer circuit does not require adjustment, and the printed circuit board is easy to make with your own hands. The board, in addition to the tuning resistor, uses SMD elements.
Transistor VT1 should be selected depending on the load power. For example, to change the brightness of a one-watt LED, a bipolar transistor with a maximum permissible collector current of 500 mA will be sufficient.
The brightness of the LED strip must be controlled from a +12 V voltage source and match its supply voltage. Ideally, the regulator should be powered by a stabilized power supply specifically designed for tape.
The load in the form of individual high-power LEDs is powered differently. In this case, the dimmer's power source is a current stabilizer (also called an LED driver). Its rated output current must match the current of the LEDs connected in series.
Read also
Chip NCP1014 is a PWM controller with a fixed conversion frequency and a built-in high-voltage switch. Additional internal blocks implemented as part of the microcircuit (see Fig. 1) allow it to provide the entire range of functional requirements for modern power supplies.
Rice. 1.
Series controllers NCP101X were discussed in detail in an article by Konstantin Staroverov in issue 3 of the magazine for 2010, therefore, in the article we will limit ourselves to considering only the key features of the NCP1014 microcircuit, and will focus on considering the features of the calculation and operating mechanism of the IP presented in the reference design.
The NCP1014 controller is available in three types of packages - SOT-223, PDIP-7 and PDIP-7 GULLWING (see Fig. 2) with the pinout arrangement shown in Fig. 3. The latest package is a special version of the PDIP-7 package with special pin molding, making it suitable for surface mounting.

Rice. 2.

Rice. 3.
Typical application diagram of the NCP1014 controller in flyback ( Flyback) converter is shown in Figure 4.

Rice. 4.
Let's consider the method of step-by-step calculation of a flyback converter based on NCP1014 using the example of a reference design of a power supply with an output power of up to 5 W to power a system of three series-connected LEDs. One-watt white LEDs with a normalization current of 350 mA and a voltage drop of 3.9 V are considered as LEDs.
The first step is to determine the input, output and power characteristics of the developed IP:
Pin=4.1W/0.78=5.25W
Vdc(min) = Vdc(min) x 1.41 = 85 x 1.41 = 120 V (dc)
Vdc(max) = Vdc(max) x 1.41 = 265 x 1.41 = 375 V (dc)
The first input link is the fuse and EMI filter, and their selection is second step when designing IP. The fuse must be selected based on the breaking current value, and in the presented design, a fuse with a breaking current of 2 A is selected. We will not delve into the procedure for calculating the input filter, but only note that the degree of suppression of common-mode and differential noise largely depends on the topology of the printed circuit board , as well as the proximity of the filter to the power connector.
The third step is the calculation of parameters and selection of a diode bridge. The key parameters here are:
IFSM ≥ 5 x IF = 5 x 0.066 = 330 mA.
The fourth step is to calculate the parameters of the input capacitor installed at the output of the diode bridge. The size of the input capacitor is determined by the peak value of the rectified input voltage and the specified level of input ripple. A larger input capacitor provides lower ripple values, but increases the inrush current of the power supply. In general, the capacitance of a capacitor is determined by the following formula:
Cin = Pin/, where
fac is the frequency of the AC mains (60 Hz for the design considered);
DV is the permissible ripple level (20% of Vdc(min) in our case).
Cin = 5.25/ = 17 µF.
In our case, we choose an aluminum electrolytic capacitor with a capacity of 33 μF.
The fifth and main step is the calculation of a winding product - a pulse transformer. The calculation of the transformer is the most complex, important and “subtle” part of the entire calculation of the power source. The main functions of the transformer in a flyback converter are the accumulation of energy when the control switch is closed and current flows through its primary winding, and then its transmission to the secondary winding when the power to the primary part of the circuit is turned off.
Taking into account the input and output characteristics of the power supply calculated in the first step, as well as the requirements for ensuring the operation of the power supply in the transformer continuous current mode, the maximum value of the fill factor ( duty cycle) is equal to 48%. We will carry out all calculations of the transformer based on this fill factor value. Let us summarize the calculated and specified values of the key parameters:
Now we can calculate the inductance of the primary winding of the transformer:
Lpri = Vin(min) x dmax/(Ipeak x fop) = 2.09 mH
The ratio of the number of turns of windings is determined by the equation:
Npri/Nsec = Vdc(min) x dmax/(Vout + V F x (1 - dmax)) ≈ 7
All we have to do is check the ability of the transformer to “pump” the required output power through itself. This can be done using the following equation:
Pin(core) = Lpri x I 2 peak x fop/2 ≥ Pout
Pin(core) = 2.09 mH x 0.22 2 x 100 kHz/2 = 5.05 W ≥ 4.1 W.
From the results it follows that our transformer can pump the required power.
It can be noted that here we have not given a complete calculation of the parameters of the transformer, but have only determined its inductive characteristics and shown the sufficient power of the chosen solution. Many works have been written on the calculation of transformers, and the reader can find calculation methods of interest, for example, in or. Coverage of these techniques is beyond the scope of this article.
The electrical circuit of the power supply, corresponding to the calculations performed, is presented in Figure 5.

Rice. 5.
Now it’s time to get acquainted with the features of the above solution, the calculation of which was not given above, but which are of great importance for the functioning of our IP and understanding the features of the implementation of the protective mechanisms implemented by the NCP1014 controller.
The secondary part of the circuit consists of two main blocks - a unit for transmitting current to the load and a power supply unit for the feedback circuit.
When the control switch is closed (direct mode), the power supply circuit of the feedback circuit operates, implemented on diode D6, current-setting resistor R3, capacitor C5 and zener diode D7, which together with diode D8 sets the required supply voltage (5.1 V) of the optocoupler and shunt regulator IC3 .
During reverse stroke, the energy stored in the transformer is transferred to the load through diode D10. At the same time, storage capacitor C6 is charged, which smoothes out output ripples and provides a constant supply voltage to the load. The load current is set by resistor R6 and controlled by shunt regulator IC3.
The IP has protection against load disconnection and load short circuit. Short circuit protection is provided by the TLV431 shunt regulator, the main role of which is the regulator of the OS circuit. A short circuit occurs under the condition of a short breakdown of all load LEDs (if one or two LEDs fail, their functions are taken over by parallel zener diodes D11...D13). The value of resistor R6 is selected so that at an operating load current (350 mA in our case), the voltage drop across it is less than 1.25 V. When a short circuit occurs, the current through R6 increases sharply, which leads to the opening of the shunt IC3 and the activation of the optocoupler IC2 and forces controller NCP1014 reduce the output voltage.
The protection mechanism against load disconnection is based on connecting the zener diode D9 in parallel with the load. When the load circuit opens and, as a consequence, the output voltage of the power supply increases to 47 V, the zener diode D9 opens. This turns on the optocoupler and forces the controller to reduce the output voltage.
For those who, before starting to develop their own IP based on NCP1014, want to make sure that this is a truly simple, reliable and effective solution, ONSemiconductor produces several types of evaluation boards (see Table 1, Fig. 6; available for order through COMPEL) .
Table 1. Review of evaluation boards
| Order code | Name | Short description |
|---|---|---|
| NCP1014LEDGTGEVB | 8W LED driver with 0.8 power factor | The board is designed to demonstrate the possibility of building an LED driver with a power factor > 0.7 (Energy Star standard) without the use of an additional PFC chip. The 8 W output power makes this solution ideal for powering structures like the Cree XLAMP MC-E, which contain four LEDs in series in one package. |
| NCP1014STBUCGEVB | Non-inverting buck converter | The board is proof of the statement that the NCP1014 controller is sufficient to build low-price power supplies for harsh operating conditions. |

Rice. 6.
In addition, there are several more examples of ready-made designs of various IPs, in addition to those discussed in the article. This is a 5 W AC/DC adapter for cell phones, and another IP option for LED, as well as a large number of articles on the use of the NCP1014 controller, which you can find on the official website of the ONSemiconductor company - http://www.onsemi.com/.
The COMPEL company is the official distributor of ONSemiconductor and therefore on our website you can always find information about the availability and cost of chips produced by ONS, and also order prototypes, including NCP1014.
Using the NCP1014 controller, manufactured by ONS, allows you to develop highly efficient AC/DC converters to supply loads with stabilized current. Proper use of the key capabilities of the controller allows you to ensure the safe operation of the final power supply in conditions of open or short-circuit of the load with a minimum number of additional electronic components.
1. Konstantin Staroverov “Use of NCP101X/102X controllers in the development of medium-power network power supplies,” Electronics News magazine, No. 3, 2010, pp. 7-10.
4. Mack Raymond. Switching power supplies. Theoretical foundations of design and guidance for practical application / Transl. from English. Pryanichnikova S.V., M.: Publishing house "Dodeka-XXI", 2008, - 272 pp.: ill.
5. Vdovin S.S. Design of pulse transformers, L.: Energoatomizdat, 1991, - 208 pp.: ill.
6. TND329-D. "5W Cellular Phone CCCV AC-DC Adepter"/ http://www.onsemi.com/pub_link/Collateral/TND329-D.PDF.
7. TND371-D. "Offline LED Driver Intended for ENERGY STAR"/ http://www.onsemi.com/pub_link/Collateral/TND371-D.PDF.
Obtaining technical information, ordering samples, delivery - e-mail:

NCP4589 - new 300 mA CMOS LDO regulator from ON Semiconductor. The NCP4589 switches to low consumption mode at low current loads and automatically switches back to "fast" mode once the output load exceeds 3 mA.
The NCP4589 can be put into permanent fast mode by forcing mode selection (control via a special input).
Main characteristics of NCP4589:
Low Consumption Mode - 1.0 µA at V OUT< 1,85 В
Fast mode - 55 µA
Power saving mode - 0.1 µA
NCP4620 - This is a CMOS LDO regulator for a current of 150 mA from ON Semiconductor with an input voltage range from 2.6 to 10 V. The device has high output accuracy - about 1% - with a low temperature coefficient of ±80 ppm/°C.
The NCP4620 has overheat protection and an Enable input, and is available in standard and Auto Discharge versions.
Main characteristics of NCP4620:
LEDs are becoming more and more common in our daily lives. We change incandescent lamps in an apartment or house, halogen lamps in a car with LED ones. In order to regulate the brightness of an Addison bulb, a dimmer is usually used - this is a thing with which you can limit the alternating current, thereby changing the brightness of the glow to the one you need. Why pay more, and even feel discomfort due to excessively bright light? The power regulator can generally be used for many consumers (soldering iron, grinder, vacuum cleaner, drill...) from alternating mains voltage; they are usually built on the basis of a triac.
LEDs are powered by direct and stabilized current, so a standard dimmer cannot be used here. If you simply change the voltage supplied to it, the brightness will change very sharply, current is important for them, but instead of a current regulator we will do something else, namely PWM (Pulse Wide Modulator), it will turn off the power supply from the LED for a certain time, the brightness will decrease, but we will not notice the blinking, since the frequency is such that the human eye will not notice it. Microcontrollers are not used here, because their presence can become an obstacle to assembling the device; you need to have a programmer, certain software... Therefore, in this simple circuit only simple and publicly available radio components are used.
This kind of thing can be used for any inertial loads, that is, those that can store energy, because if, for example, you disconnect a DC motor from the power source, it will not immediately stop rotating.
The circuit, in my opinion, can be roughly divided into two parts, namely a generator made on the mega-popular timer NE555 (analogue -KR1006VI1) and a powerful opening/closing transistor, with the help of which power is supplied to the load (here the 555 operates in the astable multivibrator). We use a powerful bipolar transistor NPN structure (I took TIP122), but it is possible to replace it with a field-effect (MOSFET) transistor. The pulse generator frequency, period, and pulse duration are set by two resistors (R3, R2) and capacitors (C1, C2), and we can change it with a resistor with resistance adjustment.
Schematic components
There are a lot of programs for calculating the 555 analog timer, you can experiment with the values of the components that affect the frequency of the generator - all this can be easily calculated using many programs, such as this one. You can change the denominations a little, everything will work as is. Pulse diodes 4148 can be easily replaced with domestic KD222. Capacitors 0.1 µF and 0.01 µF ceramic disk capacitors. We set the frequency with a variable resistor; for good and smooth adjustment, its maximum resistance is 50 kOhm.
Everything is assembled on discrete elements, the board has dimensions of 50-25 mm.
How does the circuit work?
The device works as a switch between two modes: current is supplied to the load And no current is supplied to the load. The switching occurs so quickly that our eyes do not see this blinking. So, this device regulates power by changing the interval between the time when power is supplied and when it is turned off. I think you understand the essence of PWM. This is how it looks on the oscilloscope screen.
The first picture displays a faint glow, because during the period T, the pulse length t1 occupies only 20% (this is the so-called duty cycle), and the remaining 80% is logical 0 (no voltage).
The second picture shows us a signal called a square wave, then we have t1=0.5*T, that is, duty cycle and coefficient. Filling is 50%.
In the third case we have D=90%. The LED shines at almost full brightness.
Let's imagine that T=1 second, then in the first case
§ 1) for 0.2 s current will flow to the LED, but not for 0.8 s
§ 2)0.5s current supplied 0.5s no
By the way, by making three boards of PWM regulators according to the diagram and connecting them to one RGB strip, it becomes possible to set the desired gamut of light. Each of the boards controls its own LEDs (red, green and blue) and by mixing them in a certain sequence you achieve the desired glow.
What kind of energy losses does this device have?
Firstly, these are a measly few milliamps, which consume a pulse generator on a microcircuit, and then there is a power transistor, which dissipates power equal to approximately P=0.6V*I consumptionload . The base resistor can be neglected. In general, losses on PWM are minimal because the pulse width control system is very effective, since very little energy is wasted (and, therefore, little heat is generated).
Outcome
As a result, we got a beautiful and simple PWM. It turned out to be very convenient for them to adjust the pleasant intensity of the glow for themselves. Such a device will always be useful in everyday life.







