Առաջարկվող ծրագրավորողը հիմնված է 2004 թվականի «Ռադիո» թիվ 2 ամսագրի «Ծրագրավորում ժամանակակից PIC16, PIC12 PonyProg» ամսագրի հրապարակման վրա։ Սա իմ առաջին ծրագրավորողն է, ով ես օգտագործում էի PIC չիպերը տանը ֆլեշում: Ծրագրավորողը JDM ծրագրավորողի պարզեցված տարբերակն է, բնօրինակ միացումն ունի RS-232 դեպի TTL փոխարկիչ MAX232 միկրոսխեմայի տեսքով, այն ավելի ունիվերսալ է, բայց դուք չեք կարող այն հավաքել «ծնկների վրա»: Այս միացումն ընդհանրապես չունի մեկ ակտիվ բաղադրիչ, չի պարունակում սակավ մասեր և շատ պարզ է, այն կարող է հավաքվել առանց տպագիր տպատախտակի օգտագործման:
Բրինձ. 1. Ծրագրավորողի սխեմատիկ դիագրամ:
Շղթայի շահագործման նկարագրությունը
Ծրագրավորողի սխեման ներկայացված է Նկ. 1. CLK (clocking), DATA (information), Upp (ծրագրավորման լարման) սխեմաների ռեզիստորները ծառայում են սահմանափակելու հոսանքի հոսքը։ PIC կարգավորիչները պաշտպանված են խափանումից ներկառուցված zener դիոդներով, ուստի որոշակի համատեղելիություն կա TTL-ի և RS-232 տրամաբանության միջև: Ներկայացված սխեման պարունակում է VD1, VD2 դիոդներ, որոնք «վերցնում» են դրական լարումը COM պորտից 5-րդ պտուտակի համեմատ և փոխանցում այն կարգավորիչին, ինչի շնորհիվ որոշ դեպքերում հնարավոր է ազատվել էներգիայի լրացուցիչ աղբյուրից:
Կարգավորում
Գործնականում միշտ չէ, որ պատահում է, որ այս ծրագրավորողը աշխատի առանց ճշգրտման, առաջին իսկ փորձից, քանի որ... Այս շղթայի շահագործումը մեծապես կախված է COM պորտի պարամետրերից: Այնուամենայնիվ, ինձ համար երկու մայր տախտակներ Gigabyte 8IPE1000 և WinFast XP-ի տակ, ամեն ինչ անմիջապես աշխատեց: Եթե դուք չափազանց ծույլ եք գործ ունենալ կոտրված, ավելի բարդ ծրագրավորողի սխեմայի հետ, ապա պետք է փորձեք հավաքել այս մեկը: Ահա որոշ բաներ, որոնք կարող են ազդել.
Որքան նոր է գորգը: տախտակ, մշակողները ավելի քիչ ուշադրություն են դարձնում այս նավահանգիստներին, քանի որ այս նավահանգիստները վաղուց արդեն հնացել են: Դուք կարող եք ազատվել դրանից՝ գնելով USB-COM ադապտեր, թեև կրկին գնված սարքը կարող է հարմար չլինել: Անհրաժեշտ պարամետրերը հետևյալն են. փոփոխական լարումը պետք է փոխվի առնվազն -10V-ից մինչև +10V (log. 0 և 1) միակցիչի 5-րդ պինին համեմատ: Մատակարարվող հոսանքը պետք է լինի առնվազն այնպիսին, որ երբ 2,7 կՕմ դիմադրությունը միացված է 5-րդ կոնտակտի և փորձարկվող կոնտակտի միջև, լարումը չիջնի 10 Վ-ից (ես ինքս նման տախտակներ չեմ տեսել): Նաև նավահանգիստը պետք է ճիշտ որոշի կարգավորիչից եկող լարումները. 0 Վ-ին մոտ լարման մակարդակում, բայց ոչ ավելի, քան 2 Վ, որոշվում է զրո, և, համապատասխանաբար, 2 Վ-ից բարձր լարման մակարդակում որոշվում է մեկը:
Խնդիրներ կարող են առաջանալ նաև ծրագրային ապահովման պատճառով։
Սա հատկապես վերաբերում է LINUX OS-ին, քանի որ... Գինու, VirtualBox-ի նման էմուլյատորների առկայության պատճառով պորտերը կարող են ճիշտ չաշխատել, և դրանցից պահանջվում են մեծ հնարավորություններ։ Այս խնդիրներին ավելի մանրամասն կանդրադառնամ մեկ այլ հոդվածում։
Իմանալով այս հատկանիշները, եկեք սկսենք կարգավորել այն:
Դրա համար շատ ցանկալի է ունենալ ICProg 1.05D ծրագիրը։
Ծրագրի մենյուում նախ պետք է պարամետրերում ընտրել համապատասխան պարամետրը: նավահանգիստ (COM1. COM2), ընտրեք JDM ծրագրավորող: Այնուհետև բացեք «Սարքավորումների ստուգում» պատուհանը «Կարգավորումներ» ցանկում: Այս ընտրացանկում դուք պետք է ստուգեք տուփերը մեկ առ մեկ և օգտագործեք վոլտմետր՝ միացված միակցիչի կոնտակտներում լարումը չափելու համար: Եթե լարման պարամետրերը չեն համապատասխանում նորմերին, ապա, ցավոք, դա կարող է լինել անգործունակության պատճառը, ապա դուք ստիպված կլինեք միացում հավաքել RS-232 TTL փոխարկիչով: Բոլոր վանդակները ստուգելուց հետո դուք պետք է համոզվեք, որ zener-ի դիոդում մոտ 5 Վ սնուցման լարում է առաջանում: Եթե լարումները նորմալ են, և տեղադրման սխալներ չկան, ապա ամեն ինչ պետք է աշխատի: Կարգավորիչը դնում ենք վարդակից, բացում ենք որոնվածը, ծրագրավորում։ Կարիք չկա միացնել վանդակները, ինչպիսիք են «Invert data out» (բոլորն էլ նշված չեն): Նաև մի մոռացեք, որ կարգավորիչների որոշ խմբաքանակներ կարող են ունենալ ոչ ստանդարտ պարամետրեր, և դրանք հնարավոր չէ թարթել, նման դեպքերում այս ծրագրավորողի միջոցով կարող եք փորձել նվազեցնել մատակարարման լարումը 5 Վ-ից մինչև 3-4 Վ. համապատասխանաբար միացնելով: zener diode, նայեք վերահսկիչին LVP (ցածր լարման ծրագրավորում) ռեժիմի սխալ ակտիվացման համար, ինչպես կանխել այն, կարող եք կարդալ ինտերնետում որոշակի տեսակի կարգավորիչի համար: Հավանաբար, հնարավոր է մեծացնել խնդրահարույց կարգավորիչի ծրագրավորման լարումը միայն շղթան բարդացնելով` ներդնելով ուժեղացման փուլ ընդհանուր թողարկիչով, որը սնուցվում է լրացուցիչ էներգիայի աղբյուրից:
Հիմա եկեք ավելի շատ խոսենք սարքի սնուցման հետ կապված խնդրի մասին: Ծրագրավորողը փորձարկվել է ICProg ծրագրերով և կոնսոլային picprog-ով Linux-ով, այն պետք է աշխատի ցանկացածի հետ, որն աջակցում է JDM-ին, եթե միացնեք էներգիայի լրացուցիչ աղբյուր (այն միացված է 1 կՕհմ ռեզիստորի միջոցով zener դիոդին, այս դեպքում ռեզիստորներով դիոդները կարող են լինել. լիովին բացառված է): Փաստն այն է, որ ծրագրավորողների կառավարման ալգորիթմները առանձին ծրագրերի համար տարբեր են, ICProg ծրագիրը ամենաանհավակնոտն է: Նկատվեց, որ Windows OS-ում այս ծրագիրը բարձրացրեց անհրաժեշտ մատակարարման լարումը չօգտագործված փին 2-ի վրա, նույն ծրագիրը Linux-ի էմուլյատորի տակ մեկ այլ գորգ: Տախտակն այլևս ի վիճակի չէր դա անել, բայց ելքը գտնվեց ծրագրավորման լարումից էներգիա վերցնելով։ Ընդհանրապես, կարծում եմ, դուք կարող եք օգտագործել այս ծրագրավորողը ICProg-ով առանց հավելյալ հոսանքի: Այլ ծրագրային ապահովման դեպքում դա դժվար թե երաշխավորվի, օրինակ, Ubuntu-ի առանց հոսանքի պահոցների «հայրենի» picprog-ը պարզապես չի հայտնաբերում ծրագրավորողին՝ ցուցադրելով «JDM սարքավորումը չի գտնվել» հաղորդագրությունը: Այն հավանաբար կամ ստանում է որոշակի տվյալներ՝ առանց ծրագրավորման լարման կիրառման, կամ դա անում է շատ արագ, որպեսզի ֆիլտրի կոնդենսատորը դեռ ժամանակ չունենա լիցքավորվելու։
Ես օգտագործել եմ JDM ծրագրավորողը կարգավորիչների համար PIC16F676, PIC16F630Եվ PIC16F629. Իմ տարբերակը բնօրինակից տարբերվում է նրանով, որ ծրագրավորման լարումը Vppկարող է կիրառվել մինչև մատակարարման լարումը Vddկարգավորիչների վերածրագրավորման համար: Շղթայի վերին մասում տրանզիստորը ծառայում է այս նպատակին: Այն բացվում է, երբ DB9F վարդակի 3-րդ պինդում լարումը հասնում է մոտավորապես 8 Վ-ի՝ վարդակից 5-ի համեմատ կամ 13 Վ-ի՝ կարգավորիչի մինուսի համեմատ: ընդդեմ. Անջատիչ Vdd_Vppփակ վիճակում թույլ է տալիս մատակարարման լարումը Vddհայտնվում են կարգավորիչի տերմինալների վրա ծրագրավորման լարումից առաջ Vpp.
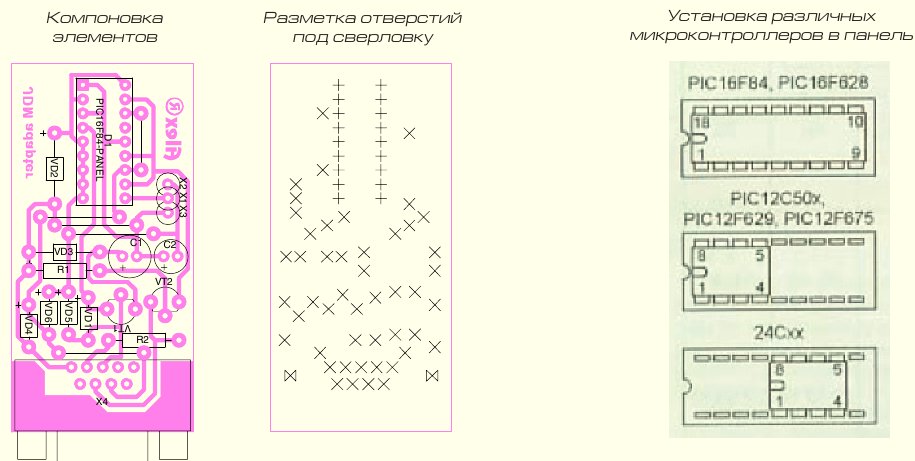
Ծրագրավորման համար կօգտագործվի COM պորտ, որը կօգտագործի հետևյալ կապերը՝ 3, 4, 5, 7 և 8։ Շղթան ներառում է սերիայի հիշողության չիպերը ծրագրավորելու հնարավորություն։ 24сХХ. Դրա համար DIP16 բլոկում օգտագործվում են ստորին 8 կոնտակտներ, միկրոսխեմայի առաջին կոնտակտը տեղադրվում է բլոկի հինգերորդ կոնտակտի մեջ: Jumper J1-ը թույլ է տալիս անջատել գրելու պաշտպանությունը:


Շղթայի ստորին տրանզիստորը, ինչպես նախկինում, օգտագործվում է լարումները փոխելու համար, քանի որ դա պլյուս է կարգավորիչի էլեկտրամատակարարման համար Vddմիանում է վարդակի 5-րդ կապին` պորտի ընդհանուր մետաղալարին և հոսանքի մինուս ընդդեմստացվում է վարդակի 3-րդ և 7-րդ կապանքներին միացված դիոդների և zener դիոդի միջոցով:

JDM ծրագրավորողում օգտագործվող տրանզիստորներ 2SC945Եվ մ.թ.ա.548, դիոդներ - 1N4148. U1 կոնդենսատորը պետք է տեղադրվի հնարավորինս մոտ միկրոկոնտրոլերի հոսանքի կապումներին: 1k ռեզիստորը կամընտիր է, եթե 10k ռեզիստորը և jumper J1-ը տեղադրված են DIP16 բլոկի վրա:

Այս ծրագրավորողը հաջողությամբ աշխատում է ծրագրերի հետ և
Պարզապես պատահեց, որ ես սկսեցի իմ ծանոթությունը AVR-ով միկրոկոնտրոլերների հետ: Առայժմ խուսափում էի PIC միկրոկոնտրոլերներից։ Բայց, այնուամենայնիվ, նրանք ունեն նաև եզակի դիզայն, որոնք հետաքրքիր է կրկնել: Բայց այս միկրոկոնտրոլերները նույնպես պետք է թարթել: Այս հոդվածը գրում եմ հիմնականում ինձ համար։ Որպեսզի չմոռանանք տեխնոլոգիան, ինչպես վառել PIC միկրոկոնտրոլերը առանց խնդիրների և ժամանակի վատնման:
Առաջին սխեմայի համար. ես երկար ու ջանք գործադրեցի ստեղծել PIC ծրագրավորող՝ օգտագործելով ինտերնետում հայտնաբերված սխեմաները, ոչինչ չստացվեց: Ամոթ է, բայց ստիպված էի դիմել ընկերոջս MK-ն բռնկելու համար։ Բայց ընկերների հետ անընդհատ վազելն այնքան էլ լավ գաղափար չէ: Այս նույն ընկերը խորհուրդ տվեց մի պարզ միացում, որն աշխատում է COM պորտից: Բայց նույնիսկ երբ ես այն հավաքեցի, ոչինչ չստացվեց: Ի վերջո, ծրագրավորողը հավաքելը բավարար չէ, դուք նաև պետք է հարմարեցնեք դրա համար ծրագիրը, որը մենք կօգտագործենք այն թարթելու համար: Բայց դա հենց այն է, ինչ ես չկարողացա անել: Ինտերնետում հրահանգների մի ամբողջ փունջ կա, և դրանցից քչերն են ինձ օգնել...
Հետո, ինձ հաջողվեց մի միկրոկոնտրոլեր թարթել։ Բայց քանի որ ես կարում էի ժամանակի խիստ ճնշման տակ, ես չէի մտածում պահպանել հրահանգների գոնե հղումը: Եվ հետո ես նրան չգտա: Ուստի, կրկնում եմ՝ ես հոդված եմ գրում, որ ունենամ իմ հրահանգները։
Այսպիսով, ծրագրավորող PIC միկրոկոնտրոլերների համար: Պարզ, թեև ոչ 5 լար, ինչպես AVR միկրոկոնտրոլերները, որոնք ես դեռ օգտագործում եմ: Ահա դիագրամը. 
Ահա տպագիր տպատախտակը (): 
COM միակցիչը կապում է ուղղակիորեն կոնտակտային բարձիկների վրա (գլխավորը համարակալման հետ չշփոթելն է): Երկրորդ շարքը կապում է տախտակին փոքր ցատկողներով (ես շատ անհասկանալի ասացի, այո): Ես կփորձեմ ձեզ լուսանկար տալ ... չնայած դա սարսափելի է (այժմ ես նորմալ տեսախցիկ չունեմ):  Ամենավատն այն է, որ PIC միկրոկոնտրոլերները 12 վոլտ են պահանջում որոնվածի համար: Եվ ավելի լավ է ոչ թե 12, այլ մի փոքր ավելի: Ասենք 13. Կամ 13.5 (ի դեպ, փորձագետներ. եթե սխալվում եմ, ուղղեք մեկնաբանություններում։ Խնդրում եմ։)։ Ինչ-որ տեղ դեռ կարելի է ձեռք բերել 12 վոլտ: Որտեղ է 13-ը: Ես ուղղակի դուրս եկա իրավիճակից՝ վերցրեցի նոր լիցքավորված լիթիում-պոլիմերային մարտկոց, որն ուներ 12,6 վոլտ։ Դե, կամ նույնիսկ չորս բջջի մարտկոց, իր 16 վոլտով (ես մի PIC-ն այսպես բռնկեցի. խնդիր չկա):
Ամենավատն այն է, որ PIC միկրոկոնտրոլերները 12 վոլտ են պահանջում որոնվածի համար: Եվ ավելի լավ է ոչ թե 12, այլ մի փոքր ավելի: Ասենք 13. Կամ 13.5 (ի դեպ, փորձագետներ. եթե սխալվում եմ, ուղղեք մեկնաբանություններում։ Խնդրում եմ։)։ Ինչ-որ տեղ դեռ կարելի է ձեռք բերել 12 վոլտ: Որտեղ է 13-ը: Ես ուղղակի դուրս եկա իրավիճակից՝ վերցրեցի նոր լիցքավորված լիթիում-պոլիմերային մարտկոց, որն ուներ 12,6 վոլտ։ Դե, կամ նույնիսկ չորս բջջի մարտկոց, իր 16 վոլտով (ես մի PIC-ն այսպես բռնկեցի. խնդիր չկա):
Բայց ես նորից շեղվեցի։ Այսպիսով, հրահանգներ PIC միկրոկառավարիչների թարթման համար: Մենք փնտրում ենք WinPIC800 ծրագիրը (ցավոք, պարզ և հայտնի icprog-ն ինձ մոտ չաշխատեց) և տեղադրում ենք այն, ինչպես ցույց է տրված սքրինշոթում։
 Դրանից հետո բացեք որոնվածի ֆայլը, միացրեք միկրոկոնտրոլերը և թարթեք այն։
Դրանից հետո բացեք որոնվածի ֆայլը, միացրեք միկրոկոնտրոլերը և թարթեք այն։
Այն ամենապարզ դիզայնն է PIC ընտանիքի կարգավորիչների համար: Անժխտելի առավելությունները՝ պարզությունը, կոմպակտությունը, էլեկտրամատակարարումն առանց այս դասական ծրագրավորողի միացման արտաքին աղբյուրի, այն դարձրեցին շատ տարածված ռադիոսիրողների շրջանում, մանավանդ որ շղթան արդեն 5 տարեկան է, և այս ընթացքում այն հաստատվել է որպես պարզ և հուսալի գործիք միկրոկոնտրոլերների հետ աշխատելու համար:
Ծրագրավորողի սխեմատիկ դիագրամ նկարների կարգավորիչների համար.

Շղթայի համար հոսանք չի պահանջվում, քանի որ դա արվում է համակարգչի COM պորտի միջոցով, որի միջոցով կառավարվում է միկրոկոնտրոլերի որոնվածը: Ցածր լարման ծրագրավորման ռեժիմի համար 5 Վ-ը բավարար է, սակայն փոփոխության բոլոր տարբերակները (ապահովիչներ) կարող են հասանելի չլինել: COM-9 պորտի միացման միակցիչը ուղղակիորեն տեղադրվել է PIC ծրագրավորողի տպատախտակի վրա. պարզվեց, որ շատ հարմար է:

Դուք կարող եք միացնել տախտակը անմիջապես նավահանգստի մեջ՝ առանց լրացուցիչ լարերի: փորձարկվել է տարբեր համակարգիչների վրա և 12F, 16F և 18F շարքերի MK-ները ծրագրավորելիս ցույց է տվել բարձրորակ որոնվածը: Առաջարկվող սխեման թույլ է տալիս ծրագրավորել PIC12F509, PIC16F84A, PIC16F628 միկրոկարգավորիչներ: Օրինակ, վերջերս, օգտագործելով առաջարկվող ծրագրավորողը, միկրոկոնտրոլեր .
Ծրագրավորման համար օգտագործվում է WinPic800-ը՝ PIC կարգավորիչների ծրագրավորման լավագույն ծրագրերից մեկը: Ծրագիրը թույլ է տալիս կատարել գործողություններ PIC ընտանիքի միկրոկարգավորիչների համար՝ կարդալ, գրել, ջնջել, ստուգել FLASH և EEPROM հիշողությունը և սահմանել կոնֆիգուրացիայի բիթերը:
Միկրոկարգավորիչի վրա ձեզ դուր եկած սխեման արագ հավաքելը խնդիր չէ շատ ռադիոսիրողների համար: Բայց շատ մարդիկ, ովքեր սկսում են աշխատել միկրոկոնտրոլերների հետ, բախվում են այն հարցին, թե ինչպես ծրագրավորել այն: Ծրագրավորողի ամենապարզ տարբերակներից մեկը JDM ծրագրավորողն է:
Այս ծրագիրը աշխատում է WindowsXP-ով: Թույլ է տալիս ծրագրավորել միջին ընտանիքի PIC կարգավորիչներ (PIC16Fxxx) համակարգչի COM պորտի միջոցով: Ծրագրավորողի միացման ցուցիչը (պատուհանի վերին աջ անկյունում) կարմիր է դառնում, եթե կարգավորումներում ընտրված պորտում ծրագրավորող չկա: Եթե ծրագրավորողը միացված է, ծրագիրը հայտնաբերում է այն, և վերին աջ անկյունում գտնվող ցուցիչը ստանում է Նկար 1-ում ներկայացված ձևը:
Ծրագրի պատուհանի ձախ կողմում կա կառավարման վահանակ: Այս վահանակը կարելի է նվազագույնի հասցնել՝ սեղմելով գործիքագոտու կոճակը կամ սեղմելով պատուհանի ձախ եզրին (սա հարմար է, երբ ծրագրի պատուհանը առավելագույնի է հասցվում ամբողջ էկրանով):






1 բիթ տեղեկատվություն միկրոկառավարիչին փոխանցելու համար անհրաժեշտ է տվյալների գծի վրա (DATA) սահմանել 0 կամ 1 (կախված բիտի արժեքից) և ժամացույցի գծում ստեղծել լարման անկում (անցում 1-ից 0): ԺԱՄԱՑՈՒՅՑ):
Հսկիչի համար մեկ բիթը բավարար չէ: Նա սպասում է ևս հինգին, որպեսզի ընկալի այս 6-բիթանոց հաղորդագրությունը որպես հրաման։ Կարգավորողին իսկապես դուր են գալիս հրամանները, և դրանք պետք է բաղկացած լինեն 6 բիթից. այդպիսին է PIC 16-ի բնույթը:
Ահա հրամանների ցանկը և նշանակությունը, որոնք PIC-ը կարողանում է հասկանալ: Հրամաններն այնքան էլ շատ չեն. այս կարգավորիչի բառապաշարը փոքր է, բայց մի կարծեք, որ դա ամբողջովին հիմար է. կան սարքեր ավելի քիչ հրամաններով:
«LoadConfiguration» 000000 - Բեռնման կոնֆիգուրացիա
«LoadDataForDataMemory» - 000011 - Տվյալների բեռնում տվյալների հիշողության մեջ (EEPROM)
«IncrementAddress» 000110 - Բարձրացնել PC MK-ի հասցեն
«ReadDataFromProgramMemory» 000100 - ծրագրային հիշողությունից տվյալների ընթերցում
«ReadDataFromDataMemory» 000101 - տվյալների ընթերցում տվյալների հիշողությունից (EEPROM)
«BeginProgrammingOnlyCycle» 011000 - Սկսեք ծրագրավորման ցիկլը
«BulkEraseProgramMemory» 001001 - ծրագրի հիշողության ամբողջական ջնջում
«BulkEraseDataMemory» 001011 - տվյալների հիշողության ամբողջական ջնջում (EEPROM)
Կարգավորիչը տարբեր կերպ է արձագանքում այս հրամաններին: Տարբեր ձևերով, հրամանը տալուց հետո, պետք է շարունակել զրույցը նրա հետ։
Լրիվ ծրագրավորման գործընթաց սկսելու համար պետք է նաև 12 վոլտ լարում կիրառեք կարգավորիչի MCLR փին, այնուհետև կիրառեք սնուցման լարում: Հենց լարման մատակարարման այս հաջորդականության մեջ կա որոշակի իմաստ: Էլեկտրաէներգիայի միացումից հետո, եթե PIC-ը կարգավորվի այնպես, որ աշխատի ներքին RC տատանվողից, այն կարող է սկսել իր սեփական ծրագիրը գործարկել, որը ծրագրավորման ժամանակ անթույլատրելի է, քանի որ ձախողումն անխուսափելի է:
MCLR-ին 12 վոլտ լարման նախնական մատակարարումը թույլ է տալիս խուսափել նման զարգացումից:
Հրամանից հետո MK ծրագրերի ֆլեշ հիշողության մեջ տեղեկատվություն գրելիս
«LoadDataForProgramMemory» 000010 - Տվյալների բեռնում ծրագրի հիշողության մեջ
անհրաժեշտ է տվյալներն ինքնին ուղարկել վերահսկիչին՝ 16 բիթ,
որոնք այսպիսի տեսք ունեն.
«0xxxxxxxxxxxxxxx 0»:
Այս բառի խաչերը հենց տվյալներն են, իսկ ծայրերում գտնվող զրոները ուղարկվում են որպես շրջանակ, սա ստանդարտ PIC 16-ի համար է: Մեկ բառում կա ընդամենը 14 կարևոր բիթ: Կարգավորիչների այս շարքն ունի 14-բիթանոց հրաման: ներկայացուցչության ձևաչափ:
Տվյալների բառի փոխանցման ավարտից հետո PIC-ը սպասում է հաջորդ հրամանին:
Քանի որ մեր նպատակն է բառ գրել MK-ի ծրագրային հիշողության մեջ, հաջորդ հրամանը պետք է լինի հրամանը
«BeginEraseProgrammingCycle» 001000 - Սկսեք ծրագրավորման ցիկլը
Ստանալով այն՝ կարգավորիչը անջատվում է արտաքին աշխարհից 6 միլիվայրկյանով, որն անհրաժեշտ է ձայնագրման գործընթացը ավարտելու համար։
Միկրոկարգավորիչի կապում ազդանշանները գեներացվում են համակարգչի կողմից՝ օգտագործելով հատուկ ծրագրեր՝ ծրագրավորողներ: COM, LPT կամ USB պորտերը կարող են օգտագործվել ազդանշանի փոխանցման համար: Ծրագրերը, ինչպիսիք են PonyProg, IsProg, WinPic800, աշխատում են JDM ծրագրավորողի հետ:

Ծրագրավորողին համակարգչին միացնելիս հարցերից մեկն այն է, թե ինչպես ապահովել ընտրովի մեկուսացում: Շղթայում անսարքության դեպքում COM պորտի վնասումից խուսափելու համար: Որոշ նմուշներ օգտագործում են MAX232 IC, որն ապահովում է ընտրովի մեկուսացում և ազդանշանի մակարդակի համապատասխանություն: Այս սխեմայում խնդիրը լուծվում է ավելի պարզ՝ օգտագործելով մարտկոցի հզորությունը: Համակարգչից եկող ազդանշանի մակարդակը սահմանափակվում է zener դիոդներով VD1, VD2 և VD3: Չնայած JDM ծրագրավորողների սխեմայի պարզությանը, այն կարող է օգտագործվել PIC միկրոկարգավորիչների մեծամասնության տեսակների ծրագրավորման համար:
COM6(DSR) և COM7(RTS) պտուտակների միջև ցատկողը նախատեսված է այնպես, որ ծրագիրը կարող է որոշել, որ ծրագրավորողը միացված է համակարգչին:
PIC16Fxxx սերիայի միկրոկոնտրոլերների համար քորոցների նշանակումը, կախված գործի տեսակից, շատ դեպքերում ստանդարտ է, բայց եթե դրանում որևէ կասկած կա, ապա ամենահուսալի է տվյալների թերթիկը ստուգել MK-ի կոնկրետ օրինակի համար: Փաստաթղթերի մի մասը հասանելի է ռուսական կայքում http://microchip.ru Տվյալների թերթիկների և այլ փաստաթղթերի ամբողջական հավաքածուն գտնվում է PIC միկրոկառավարիչ արտադրողի կայքում. http://microchip.com









